6. 第六章
6.1 状态反馈的定义及其性质
6.1.1 状态反馈的构造
给定系统的状态空间表达式:
在系统中引入反馈控制率,即状态反馈:
其中
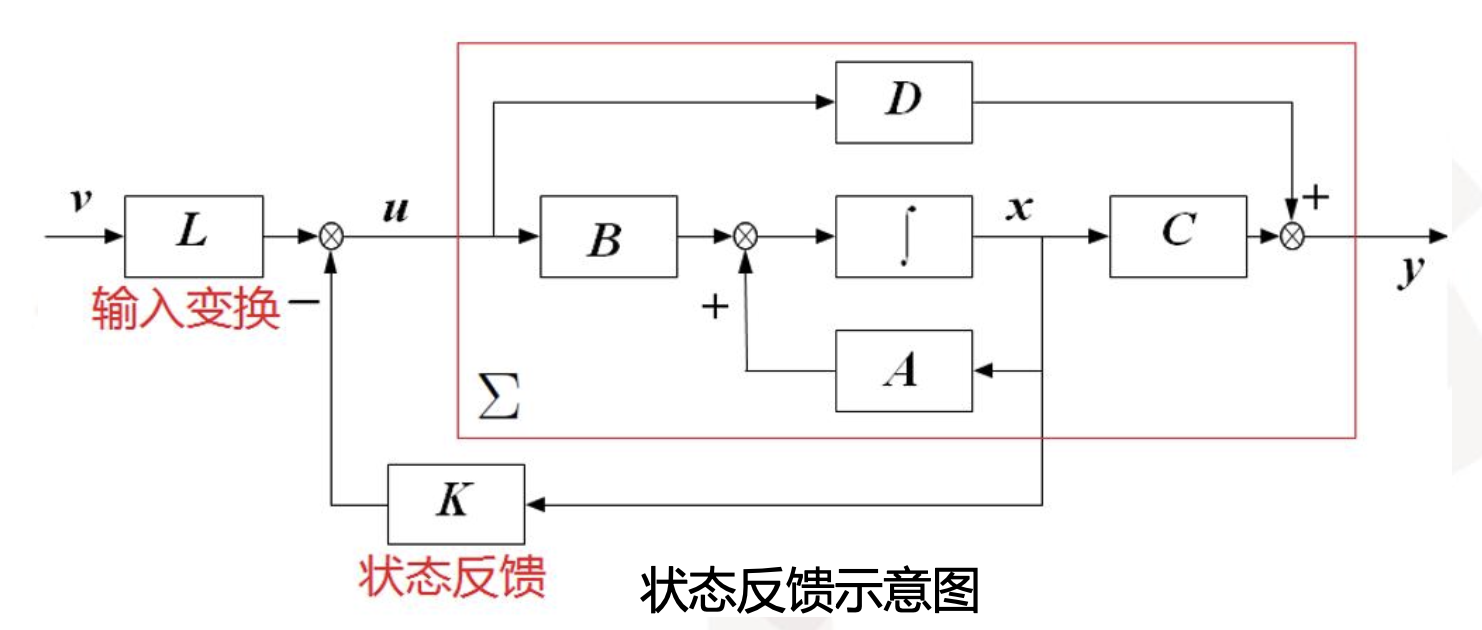
反馈后的闭环系统结构如下所示:
闭环后的状态空间表达式为:
如果
6.1.2 状态反馈的性质
当
闭环传递函数还有另一种形式:
从传递特性来看,状态反馈

6.1.3 相关定理
引入状态反馈控制率
定理:对于任何实常量矩阵
事实上
6.2 极点配置
6.2.1 极点配置定理
定理:给定系统
通过状态反馈
能使其闭环极点位于预先任意指定位置上的充要条件是
6.2.2 单输入系统极点配置的算法
第一种算法
‼️步骤:
求
求闭环系统的期望特征多项式
计算
计算
令
求
‼️重要例题:

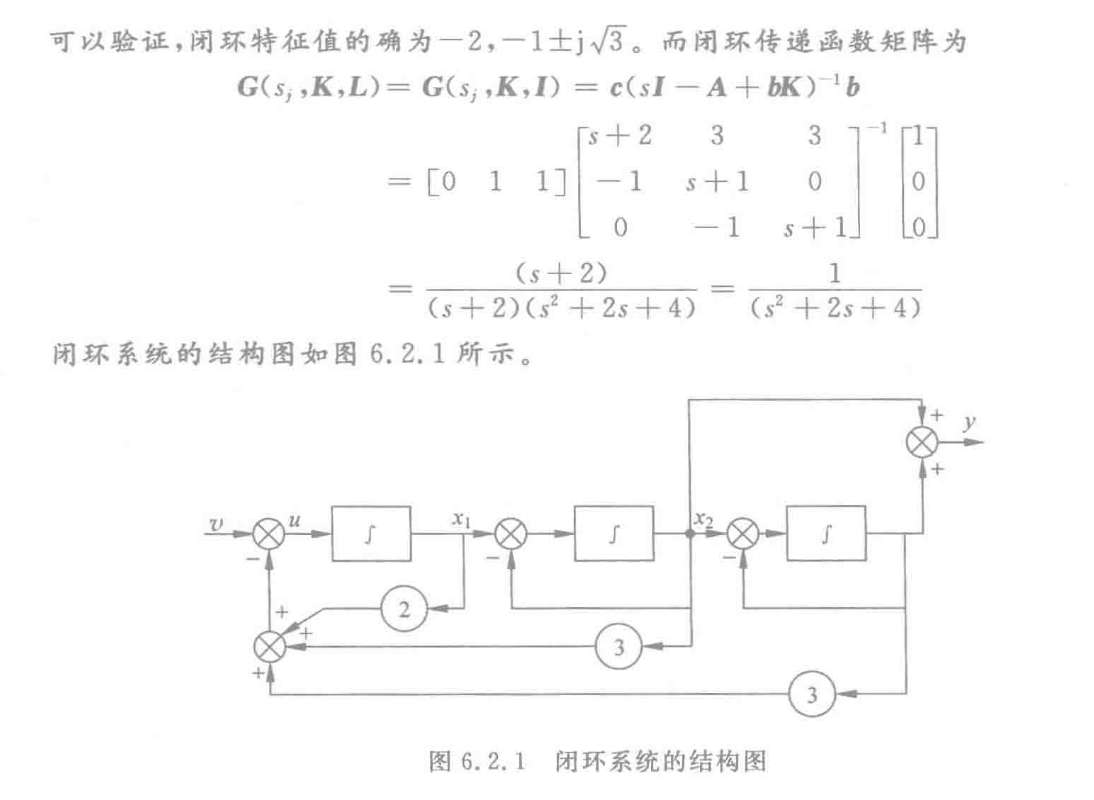
这个图先用开环的
第二种算法
‼️步骤:
将
式中,
计算理想特征多项式
列方程组
‼️重要例题:

注意:经过状态反馈
6.2.3 关于一些细节和本质的讨论
(1)状态反馈不会改变系统的维数。但是闭环传递函数的阶次可能会降低,因为闭环之后可能会分子分母对消。
(2)对于单输入单输出系统,状态反馈不会移动系统传递函数的零点。
(3)所以1-2可以很好解释为什么状态反馈可能会改变系统的能观性,因为可能出现对消情况,对消之后系统能控,所以此时一定不能观。
(4)当且仅当
(5)在系统综合中,往往需要移动不稳定的极点,就是把那些虚轴右边的极点移动到左边去,这一过程叫做系统镇定(其实就是校正)。那么在一些不完全能控的系统中,判断系统能否被镇定,就要看看不能控的那部分特征值是不是已经在系统左边了。如果不能控的部分特征值是没问题的(在左边),那么系统也可以被镇定。但是只要存在不能控的部分的特征值不符合要求(在右边)系统就不能被镇定。我能管的,你一开始不符合要求也没事,我也能控制,我管不了的(不能控部分),一开始如果不符合要求,那就没办法了。‼️
6.4 状态观测器
6.4.0 基本概念
利用状态反馈能够任意配置一个能控系统的闭环极点,从而有效改善控制系统的性能
在实际中,常常无法直接获得系统的全部状态变量,从而使得状态反馈的物理实现遇到困难。
克服这种困难的途径之一是重构系统的状态并利用重构的状态代替系统的真实状态实现所需的状态反馈。
状态重构问题的实质是构造一个新的系统(或者说装置),利用原系统中可直接测量的输入量
通常称
对于线性定常系统,状态观测器通常也是一个线性定常系统,按其结构可分为全维状态观测器和降维状态观测器。
维数等于原系统维数的观测器为全维观测器。
维数小于原系统维数的观测器为降维观测器。
当状态观测器的维数与原系统的维数相同,即要把原系统的
当原
6.4.1 状态观测器的存在条件
定理:给定线性定常系统
若此系统状态完全能观测,则状态向量
6.4.2 全维状态观测器
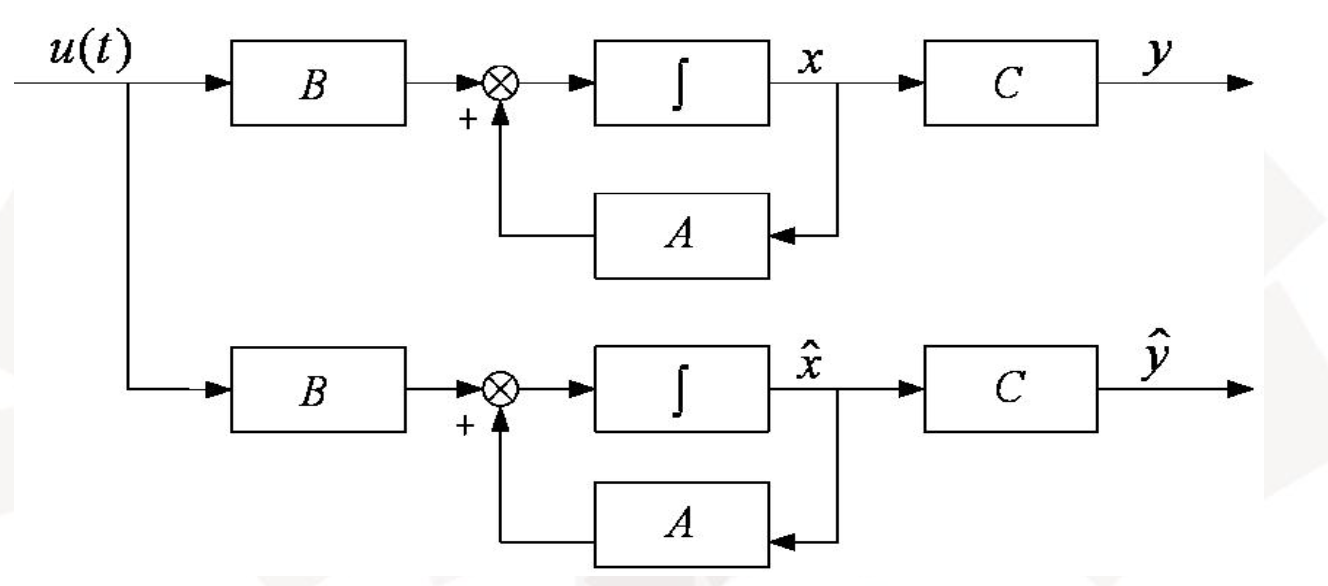
开环状态估计器
最直观的方法就是构造一个完全相同的模拟装置。
然而在实际中,这种方法是完全不行的,因为有如下缺点:
每次使用都必须重新确定原系统的初始状态并对估计器实施设置,极不方便也极不现实。
在
闭环状态估计器
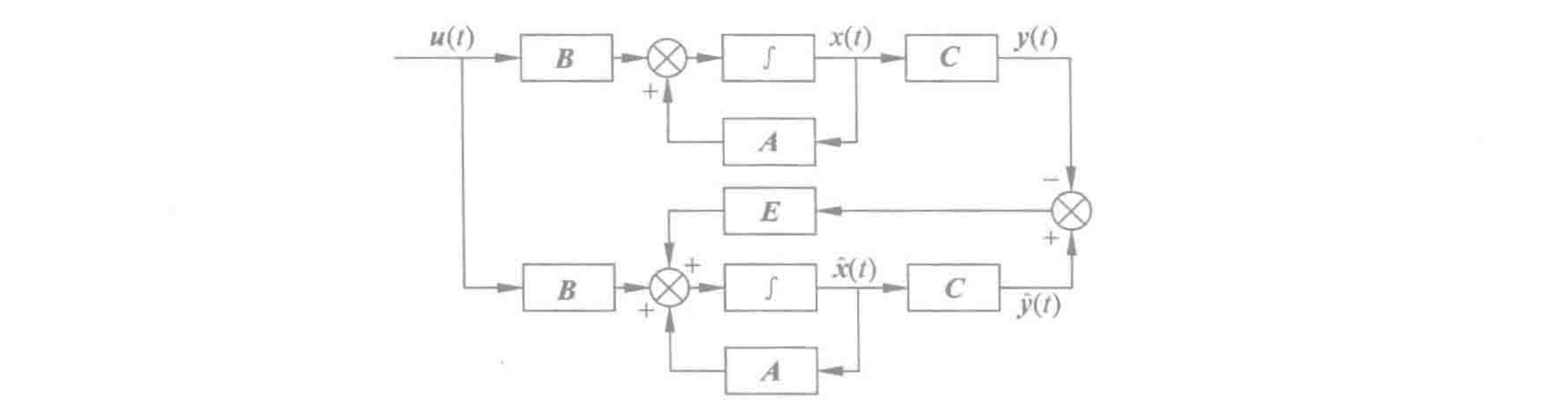
直接上结论:
由于
前面的定理已经指出:只要
‼️定理: 若n维线性定常系统状态完全能观测,则存在n维(全维)状态观测器:
其估计误差
在复共轭特征值成堆出现的条件下,可以选择矩阵
‼️计算的步骤:和极点配置的完全一样,直接看例题就行了。
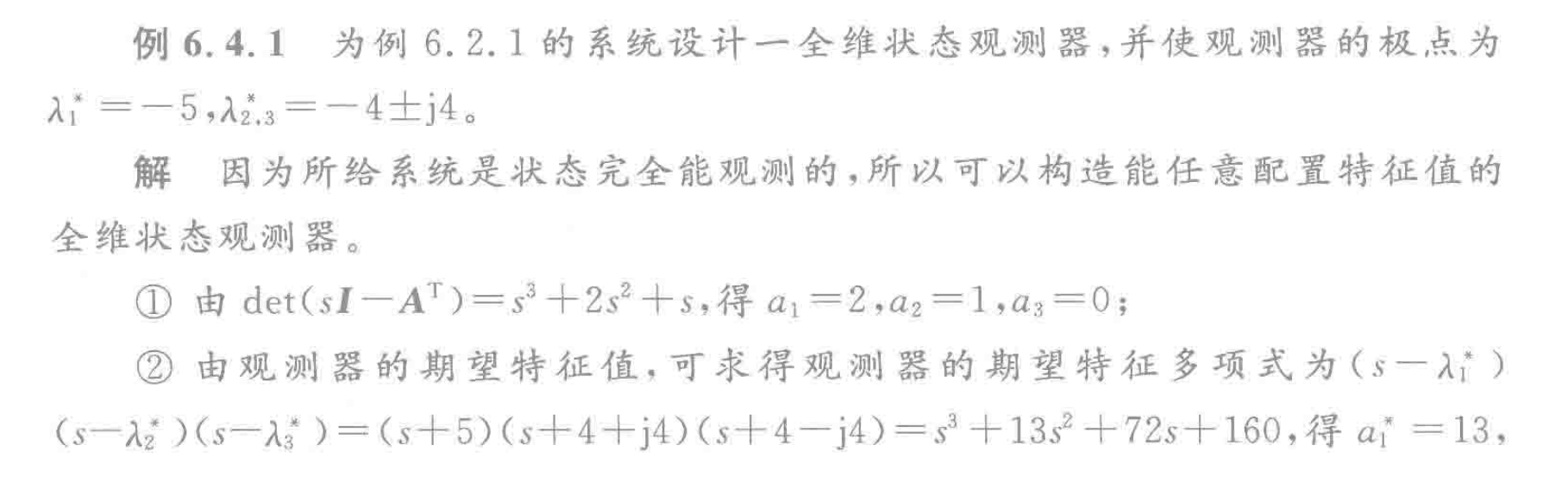
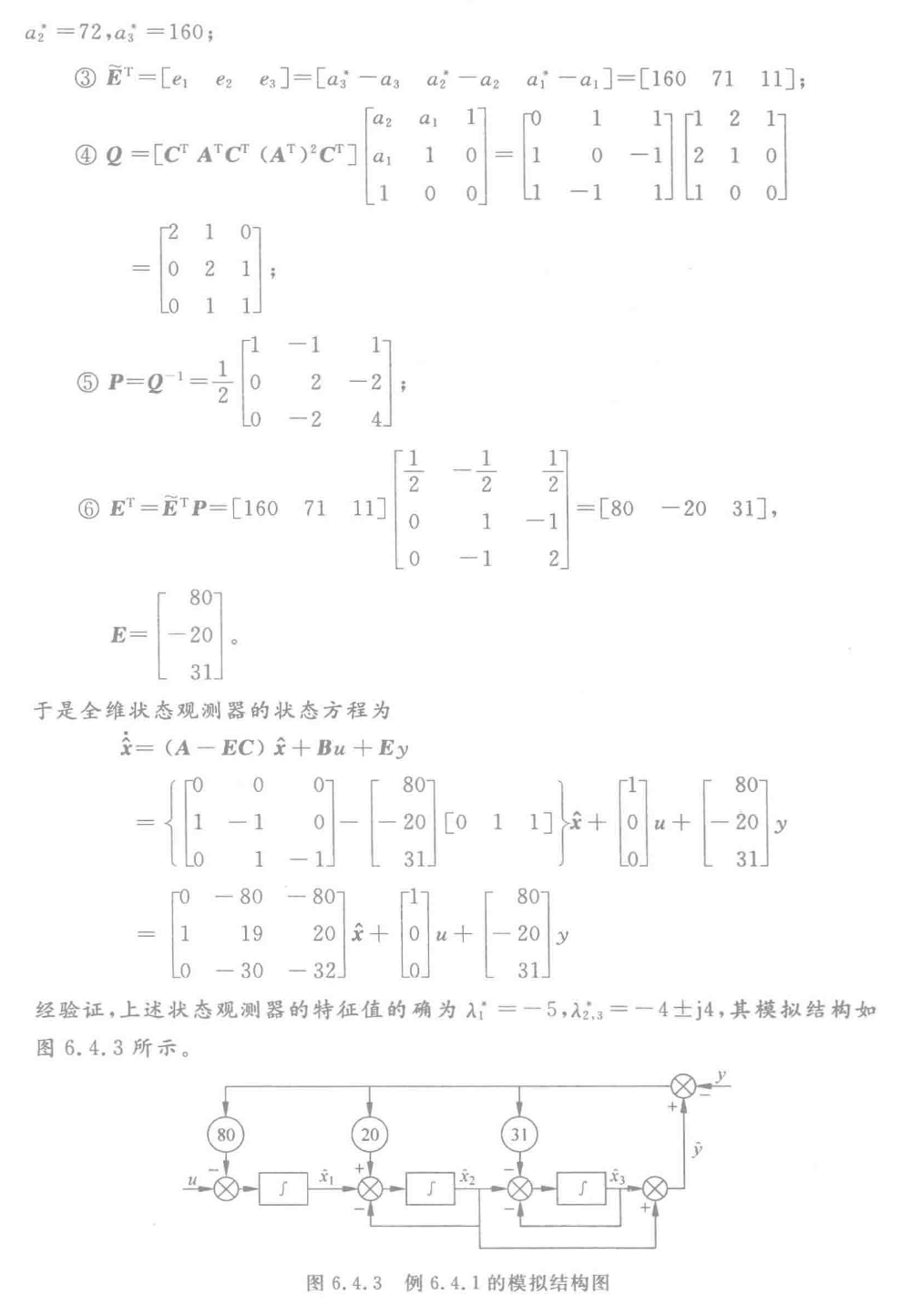
所以和极点配置是完全一样的。
这个图也很重要,要注意‼️
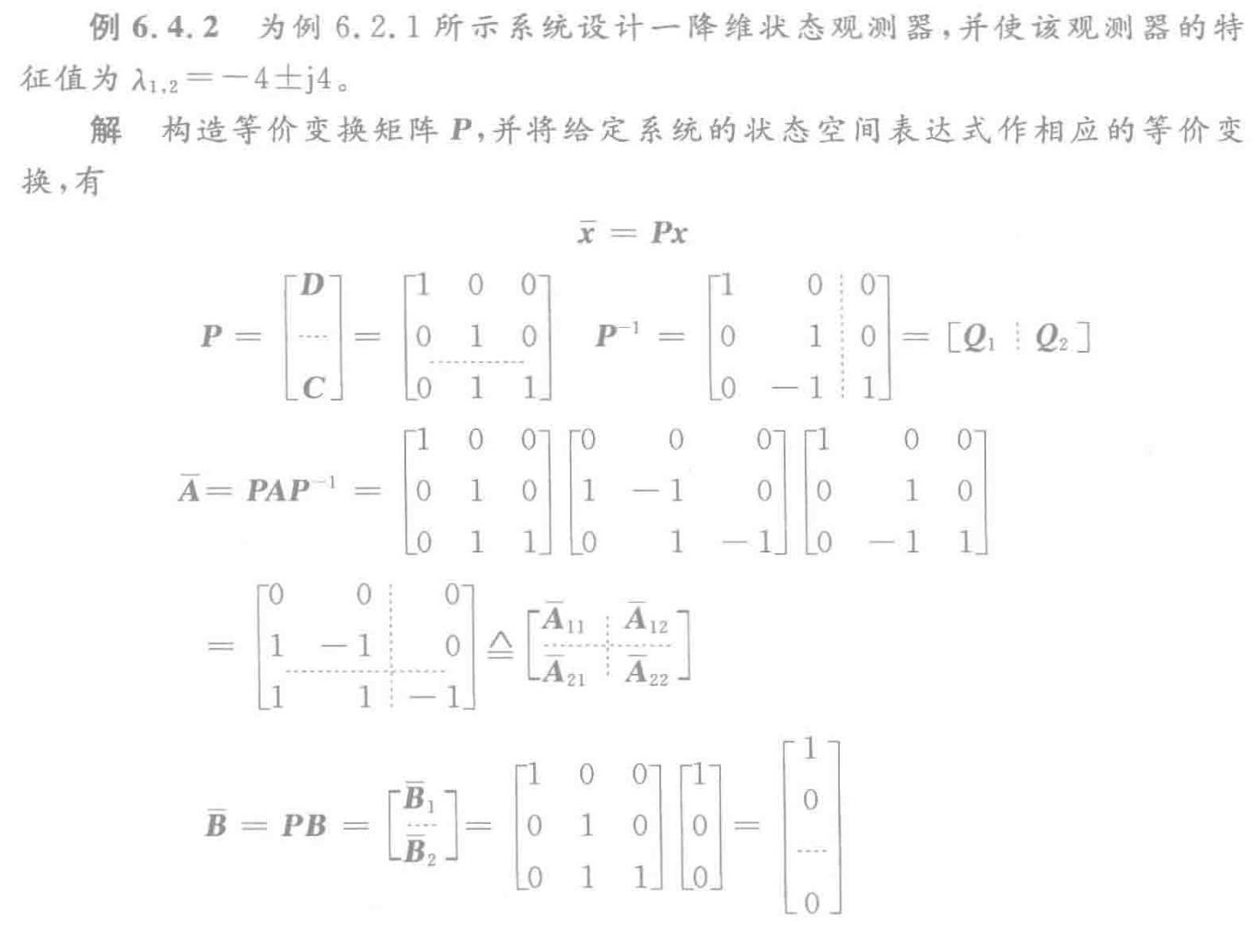
6.4.3 降维状态观测器
‼️解题步骤:
先算矩阵
对原系统的
求出期望多项式
求出行列式
然后对比上面两个多项式就能求出
构造需要观测部分的系统
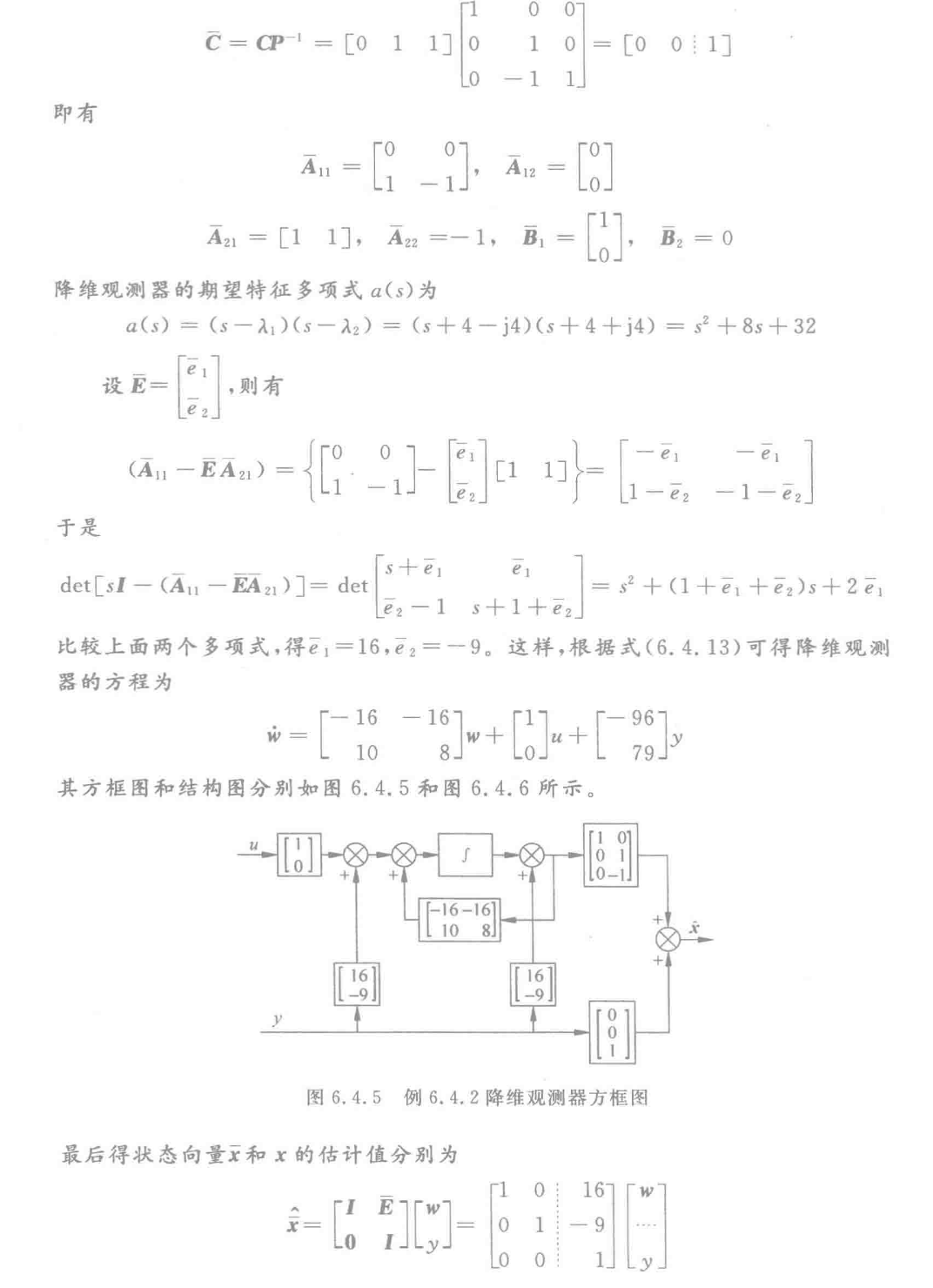
使用公式p224(6.4.13)
利用
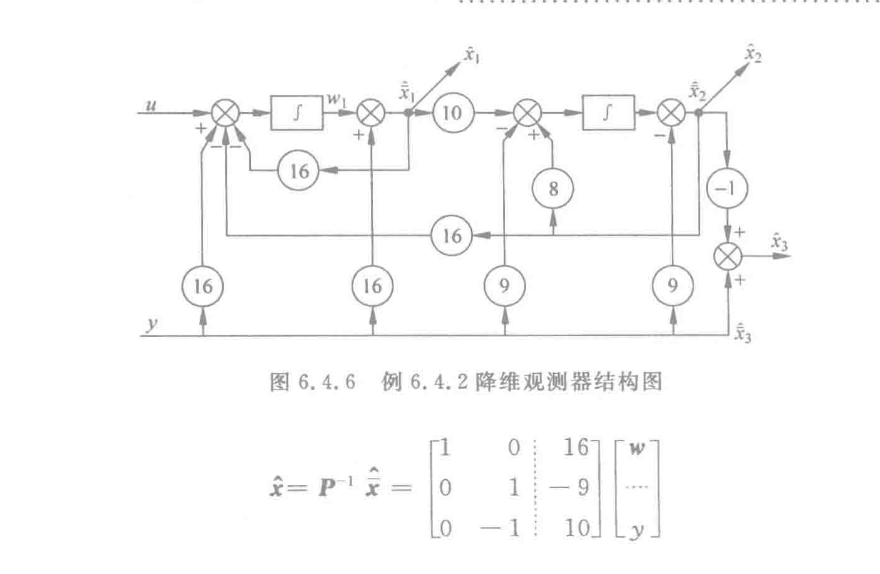
重要例题:
6.5 带状态观测器的反馈系统
通过上面的知识。当状态向量
两个问题:
配置
状态观测器本身的特性是否会受到影响?
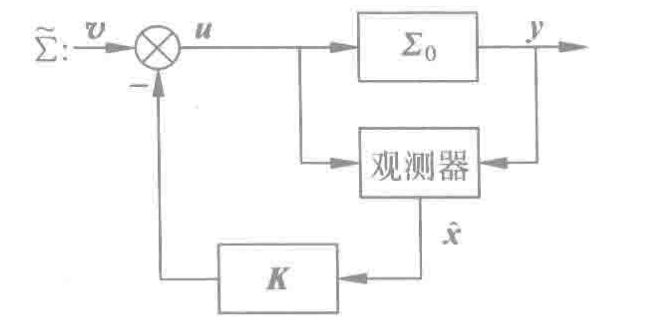
设给定系统的状态空间表达式为:
其状态观测器系统的状态空间表达式为:
所以上面图表示的系统状态空间表达式为:
改写成矩阵形式为:
讨论:
引入观测器后提高了反馈系统的维数,即系统的阶次
闭环系统
观测器的引入,不影响已经配置好的系统特征值,而状态反馈也不影响观测器的特征值。
即控制系统的动态特性与观测器的动态特性是相互独立的。从而使得系统的极点配置和状态观测器的设计可以分开独立地进行。这一结论称为分离定理‼️
观测器的引入不改变原来状态反馈系统的闭环传递函数矩阵‼️
一般来说,带观测器的状态反馈系统在鲁棒性上要比用真实状态
p232的例6.5.1是重要例题